Les
mathématiques du mouvement
Introduction informelle aux
systèmes dynamiques
Université Paris-Sud - e-mail
Article déposé le 25 juin 2010. Toute reproduction pour publication ou à des fins commerciales, de la totalité ou d'une partie de l'article, devra impérativement faire l'objet d'un accord préalable avec l'éditeur (ENS Ulm). Toute reproduction à des fins privées, ou strictement pédagogiques dans le cadre limité d'une formation, de la totalité ou d'une partie de l'article, est autorisée sous réserve de la mention explicite des références éditoriales de l'article.
Cet article
provient du Journal de maths des
élèves,
ENS-Lyon, Volume 1, 1998. CultureMATH remercie
Patrick
Iglésias et Frédéric Le Roux pour en
avoir autorisé cette réédition.
Version [pdf] (413 ko, 17 pages)
1. Pourquoi cet article ?
Je voudrais essayer de donner une idée du monde abstrait dans lequel j'ai vécu pendant mes années de thèses, en permettant ainsi au lecteur de mettre un pied dans l'univers des mathématiques actuelles. Ce sera l'occasion de présenter rapidement, à travers quelques exemples, la théorie des systèmes dynamiques ; « mathématiques du mouvement », mais aussi mathématiques en mouvement...
2. Les origines : l'étude du mouvement des planètes
On peut attribuer l'origine des systèmes dynamiques aux questions posées par la mécanique céleste, qui cherche à expliquer et prédire les trajectoires des astres.
Au début du XVIIème siècle, à partir de l'observation des planètes, Kepler énonce trois lois qui décrivent leur mouvement. Soixante ans plus tard, Newton et Leibniz inventent simultanément le calcul différentiel ; cet outil permet à Newton de justifier mathématiquement les lois de Kepler. Notamment, si deux corps s'attirent mutuellement selon une force inversement proportionnelle au carré de la distance qui les sépare (comme la force de gravitation), alors leurs trajectoires sont des ellipses situées dans un même plan.
En étudiant la trajectoire de la Lune, qui tourne autour de la Terre tournant elle-même autour du soleil, Newton pose également ce qu'on appelle maintenant « le problème des trois corps » : quelles sont les trajectoires suivies par trois corps célestes en interaction selon la loi de la gravitation ? Il n'obtient pas de réponse à cette question, et soupçonne même le problème d'être inaccessible à l'entendement humain
Au siècle suivant, d'autres mathématiciens reprennent la question. Par exemple, Euler trouve des solutions particulières dans le cas où l'on suppose la masse de la Lune négligeable devant celle de la Terre et du Soleil ; mais le problème général n'est toujours pas résolu.
En changeant radicalement l'angle d'attaque du
problème, Henri Poincaré effectue à la
fin du XIXème
siècle un apport majeur. Alors que ses
prédécesseurs
tentaient (sans succès) de trouver des solutions explicites
aux équations de Newton, il se « contente »
de chercher les réponses à certaines questions
qualitatives
sur le comportement des astres. Voici des
exemples de questions de cette nature :
- Quelles sont les solutions périodiques, autrement dit
µa quelles conditions le mouvement des trois corps
se reproduit-il identique à lui-même au bout d'un
certain laps de temps ?
- Est-il possible que l'un des trois corps échappe
à
l'attraction des deux autres en s'en éloignant
indéfiniment ?
- Le système est-il « sensible aux conditions
initiales » : est-ce qu'un éternuement peut
changer
de manière fondamentale le comportement futur
des planètes ? Attention, si vous attrapez un
rhume, vous serez peut-être responsables d'une
collision interplanétaire dans quelques milliards
d'années... Cette idée est aussi
illustrée, dans
un autre contexte, par la célèbre image du
battement
d'ailes de papillon susceptible de déclencher
un ouragan à l'autre bout de la Terre !
En renonçant à « tout dire »,
Poincaré découvre une
approche féconde et invente les systèmes
dynamiques.
3. Le cadre général
Une des occupations favorites des mathématiciens
consiste à expliquer que deux
phénomènes qui n'ont,
en apparence, absolument rien à voir sont en fait
deux cas particuliers d'un même problème. Plus
sérieusement, de manière paradoxale,
généraliser un
problème permet souvent de le résoudre plus
facilement,
parce que le cadre général fait ressortir les
hypothèses essentielles.
Nous allons donc donner une définition
générale des
systèmes dynamiques. Le passage qui suit est le plus
abstrait, et donc le moins facile de ce texte ; nous
essaierons ensuite de l'éclairer par des exemples.
Un système dynamique [1]
est la
donnée :
1. d'un ensemble d'états, noté X,
chaque
élément
x de X
représentant une position (ou état) du
système ;
2. d'une loi d'évolution (ou transformation) du
système : celle-ci associe à chaque
état x un « état
suivant » noté T(x).
Pour essayer d'éclairer ce langage, revenons un instant
au problème des trois corps : dans cette situation, un
« état du système » est la
donnée des positions dans
l'espace et des vitesses de chacun des trois corps. On
peut définir une loi d'évolution T
de la manière suivante
: pour tout état x, T(x)
est l'état une seconde
plus tard (c'est-à-dire la donnée des nouvelles
positions et vitesses).
Face à ces deux objets (ensemble d'états X
et loi
d'évolution T), le dynamicien se donne
un état initial
x et étudie la « suite des
itérés de x »,
obtenue de
la manière suivante (voir Figure 1 ci-dessous) : le
premier
itéré de
x est T(x) ; le
deuxième itéré de x
est T(T(x)), noté
plus simplement T2(x),
autrement dit « l'etat suivant
l'état suivant x ». On
définit de la
même manière,
pour tout nombre entier n, le « n
ième
itéré de x »
que l'on note Tn(x)
: dans le cas des trois corps, c'est
l'état du système après n
secondes
d'évolution.
Le dynamicien s'occupe plus précisément du
comportement
« asymptotique » (ou « à
l'infini ») de cette
suite ; voici quelques comportements possibles :
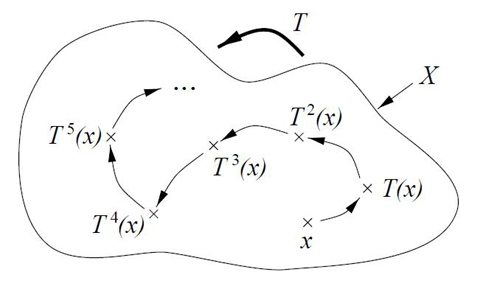 Figure 1
: Un
système dynamique abstrait
|
1. Le comportement le plus simple apparaît si x
est
un « point fixe de T »,
c'est-à-dire si T(x) = x ;
dans ce cas, tous les itérés de x
sont égaux à x (le
système ne change pas d'état, on dit aussi que x
est un point d'équilibre - voir Figure 2 ci-dessous).
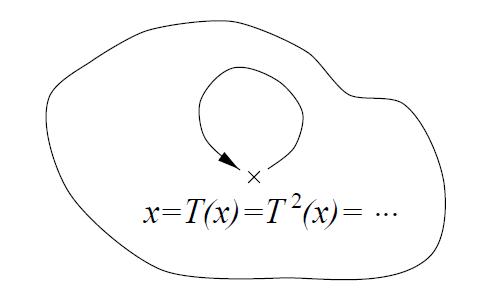 Figure 2
: Un point fixe
|
2. Il peut arriver que le premier itéré de x
soit
différent de x (l'état n'est
pas fixe), mais qu'il existe
un itéré ultérieur qui soit
égal à x ; cet
état est alors dit « périodique
« (le système occupe
périodiquement les mêmes positions - voir Figure 3
ci-dessous).
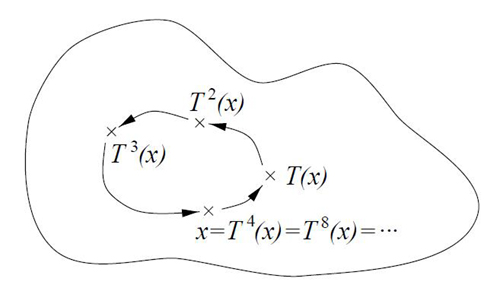 Figure 3
: Un point périodique, de période 4
|
3. Beaucoup d'autres comportements sont possibles : la suite des itérés d'un état peut se rapprocher d'un état d'équilibre, ou d'une suite d'états périodiques, ou bien passer tout prés de tous les autres états du système, ou encore « s'en aller à l'infini » !
4. Des exemples
4.1 Opiluo le Centaurien
Opiluo, de retour vers Alpha du Centaure après une petite virée, tombe en panne sèche à quelques années lumières à peine de chez lui. Pas une station-service en vue : il n'a d'autre solution que d'aller se ravitailler dans le système solaire le plus proche, et Opiluo débarque ainsi sur la troisième planète en partant du petit soleil jaune. Visiblement, le galactique standard n'est pas inscrit au programme des écoles du coin ; encore des régionalistes réfractaires à la galaxisation ! Comme les Centauriens sont des gens logiques et ordonnés, et qu'en plus ils ont tout leur temps puisque le dieu qui les a créés a oublié de les rendre mortels, il décide de commencer par étudier la langue locale. Il met la main sur un vieux dictionnaire, et cherche la signification d'un mot auquel un individu en costume bleu avait l'air d'attacher une grande importance, le mot « papier ». Il lit :
« Matière à base de cellulose, et dont on fait des feuilles qui servent à écrire. »
ce qui ne l'aide pas beaucoup. En remplaçant dans cette expression les mots qui ont l'air importants par leur définition, le sens du mot de départ devrait s'éclairer. Opiluo feuillette à nouveau son dictionnaire, et note :
« Réalité constitutive des corps, susceptible de toutes sortes de formes à base de substance organique du groupe des glucides contenue dans la membrane des cellules végétales, et dont on fait des morceaux de papier sur lesquels on peut écrire qui servent à écrire. »
Bigre ! Peut-être en réitérant le processus ? Il obtient cette fois-ci :
« Existence effective constitutive des parties
matérielles
d'un être animé, susceptible de toutes sortes
d'apparences visibles extérieures d'un objet à
base
de matière dont une chose est formée organique de
l'ensemble de personnes rapprochées dans un endroit
des constituants de la matière vivante contenant du
carbone, de l'hydrogène et de l'oxygène contenue
dans
le tissu mince, souple destiné à former des
organes des
éléments constitutifs de tout être
vivant végétaux, et
dont on fait des fragments d'un corps solide de matière
à base de cellulose, et dont on fait des feuilles qui
servent
à écrire sur lesquels on peut écrire
qui servent à
écrire. »
Découragé par la difficulté de cette
langue, mais
amusé par le procédé, Opiluo
décide de rentrer chez
lui à tentacules et de lancer la mode des
systèmes dynamiques
sur Alpha du Centaure, où il vécut heureux
et eut une infinité d'enfants...
Vous l'avez peut-être deviné, le jeu
inventé par le
Centaurien [2] est un
système dynamique
: l'ensemble
X des états du système est
constitué de toutes les
phrases de la langue française ; la transformation
T
consiste à remplacer tous les substantifs d'une phrase
par leur définition dans un dictionnaire donné.
Pour
Opiluo, l'état initial x
était le mot « papier » ;
l'état
suivant, T(x), est la
définition de ce mot ; les deux
expressions obtenues ensuite sont les deuxième et
troisième itérés de x
par la transformation T.
4.2 Un système dynamique mathématique : le SHIFT
Le deuxième exemple est moins anecdotique, et joue
un rôle important dans la théorie des
systèmes dynamiques.
Description du système. Cette fois-ci, X
est
l'ensemble des nombres compris entre 0 et 10 (sauf
10) ; la transformation T consiste à
supprimer le
chiffre avant la virgule et à décaler la virgule
d'un
rang vers la droite. Par exemple, si on part de l'état
initial :
x = π ; = 3, 14159265359…
alors
T(x) = 1, 4159265359…
puis
T2(x) = 4,
159265359...
et cetera (voir Figure 4 ci-dessous).
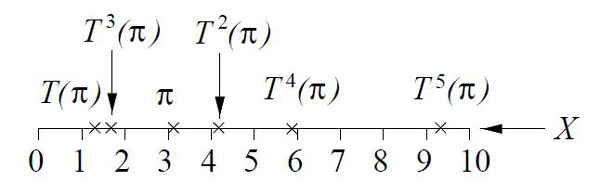 Figure 4
: Premiers itérés de π par
le SHIFT
|
Quelques propriétés.
Dans ce système dynamique,
les points fixes de l'ensemble X sont faciles
à trouver :
il y en a exactement 10 (quels sont-ils ?...). Les points
périodiques ne posent pas plus de problème : un
nombre
est un point périodique pour la transformation T
si la suite des chiffres qui le composent est périodique
(on dit aussi qu'un tel nombre est rationnel, c'est-
à-dire qu'on peut l'obtenir comme quotient de deux
nombres entiers). Par exemple, le nombre
y = 3, 3512335123351233512…
est périodique, puisque T5(y)
= T10(y)
= T15(y)
=
… = y.
Voici une caractéristique intéressante de ce
système.
Dans le premier exemple, on a pris pour état initial
le nombre x = π ;. Choisissons un autre
état
initial très proche de π ; par exemple sa valeur
décimale approchée à un
millionième par défaut,
x' = 3, 14159200000... ;
comparons les itérés successifs
des deux états x et x'
:
x = 3, 14159265359...
T(x) = 1, 4159265359...
T2(x) = 4,
159265359...
T3(x) = 1,
59265359...
T4(x) = 5,
9265359...
T5(x) = 9,
265359...
T6(x) = 2,
65359...
T7(x) = 6,
5359...
T8(x) = 5,
359...
x’ = 3, 14159200000...
T(x’) = 1,
4159200000...
T2(x’)
= 4, 159200000...
T3(x’)
= 1, 59200000...
T4(x’)
= 5, 9200000...
T5(x’)
= 9, 200000...
T6(x’)
= 2, 00000...
T7(x’)
= 0, 0000...
T8(x’)
= 0, 0000...
Alors qu'on est parti de deux états initiaux très
proches, on obtient au bout de quelques itérations
deux comportements très différents :
après le 7ème coup, les
itérés de x’ vont
rester
obstinément sur
le 0 tandis que ceux de x vont continuer
à osciller
indéfiniment... La conclusion est la suivante : on ne
peut prédire le comportement à long terme du
système
qu'à la condition incontournable de connaitre
l'état
initial avec une précision absolue (c'est-à-dire,
dans
le cas du SHIFT, connaitre toutes les décimales du
nombre de départ) : autrement dit, le système est
« sensible aux conditions initiales ».
Un des intérêts du SHIFT est que les
mathématiciens
savent reconnaitre, dans un certain nombre de
systèmes dynamiques, la présence d'un
sous-système
qui se comporte comme le SHIFT ; toutes les caractéristiques
de ce modèle (beaucoup de points
périodiques, une zone de sensibilité aux
conditions
initiales, ...) se retrouvent alors dans les systèmes
considérés.
Des statistiques sur les décimales des nombres.
A peu prés à l'époque où
Poincaré étudiait la
mécanique céleste, d'autres savants se penchaient
sur
le comportement des gaz. Maxwell a formulé le premier
ce qu'on appelle « l'hypothèse ergodique
» [3] :
supposons qu'on enferme une certaine quantité de
gaz dans un récipient ; l'énergie totale du gaz,
mesurée à un instant donné, est la
somme des
énergies cinétiques [4]
de
chacune des molécules du
gaz à cet instant (autrement dit, l'énergie
macroscopique
est la somme des énergies microscopiques).
S'il n'y a pas d'échanges de chaleur entre le gaz
et l'extérieur (autrement dit si le récipient est
thermiquement
isolé), l'énergie totale reste constante au
cours du temps, par contre l'énergie cinétique de
chaque molécule varie sans cesse au gré des chocs
contre
les autres molécules du gaz et contre les parois
du récipient. Dans cette situation, l'hypothèse
ergodique
affirme que les molécules du gaz vont occuper
successivement tous les micro-états de positions
et de vitesses compatibles avec l'énergie totale, c'est-
à-dire tels que la somme des énergies
cinétiques des
molécules du gaz soit égale à
l'énergie totale. Cette
hypothèse sur le comportement microscopique du gaz
permet notamment de faciliter le calcul des grandeurs
macroscopiques du système : énergie,
température,
entropie...
Une cinquantaine d'années plus tard (le temps que
les outils mathématiques appropriés, notamment la
« théorie de la mesure », soient
développés), cette idée
issue de la thermodynamique donne naissance à un
théorème, le théorème
ergodique de Birkhoff, et aussi à une nouvelle branche des systèmes dynamiques,
la
théorie ergodique. Ce théorème permet
d'obtenir des
renseignements statistiques sur une certaine classe de
systèmes dynamiques et notamment sur le SHIFT.
Choisissons un nombre x entre 0 et 10, « au hasard » (une des difficultés de la théorie, sur laquelle nous n'insisterons pas, consiste à donner une signification mathématique précise à ce choix aléatoire d'un élément dans un ensemble qui en contient une infinité ; on dit aussi que les propriétés que nous allons énoncer sont valables pour « presque tous » les nombres entre 0 et 10). Que peut-on dire sur les décimales de x ? Par exemple, y a-t-il des 7 parmi elles ? Si oui, quelle est la proportion de 7 parmi toutes les décimales ? Peut-on trouver quelque part la séquence 123456789 ? Ou bien la date de votre anniversaire ?
Toutes ces questions peuvent être reformulées à l'aide du SHIFT. En particulier, la n ième; décimale de x est aussi la valeur entière du n ième itéré de x. On saura donc si l'une des décimales de x est un 7 en regardant si l'un des itérés de x est compris entre 7 et 8. Mieux : on aura la proportion de 7 dans les décimales en comptant la proportion d'itérés de x qui sont entre 7 et 8.
Maintenant
que nous avons exprimé ces questions
avec le langage de la dynamique, le théorème
ergodique
accepte de nous répondre. Il affirme que
chacun des dix chiffres apparaît une infinité de
fois
dans la suite des décimales du nombre x,
et qu'on les
retrouve tous avec la même fréquence : en moyenne,
une décimale sur dix est un 7. Encore plus fort, on
retrouve aussi n'importe quelle séquence de
chiffres
une infinité de fois dans ces décimales, dans une
proportion qui dépend uniquement de la longueur de
la séquence [5] [6] !
On peut aussi exprimer les conséquences du
théorème
ergodique sur le SHIFT en termes de probabilités (on
parle alors de « théorème des grands
nombres »). La
suite des décimales d'un nombre « choisi au hasard
»
peut d'abord être vue comme le résultat d'une
infinité
de lancers successifs d'un dé (à 10 faces, et non
pipé !).
Le théorème ergodique entraine alors qu'on peut
être
presque certain que chaque face sortira en moyenne
une fois sur dix. Dans le même genre d'idée,
prenons
un singe qui a l'éternité et un ordinateur avec
traitement
de texte devant lui, et supposons qu'il se mette
à taper indéfiniment au hasard sur le clavier. On
peut
alors affirmer qu'un jour, le singe tapera les œuvres
complètes de Balzac (et aussi, juste après, le
texte que
vous avez sous les yeux...). Bien sûr, ça lui
prendra
un sacré bout de temps, et la plus grande partie de
sa production n'aura aucun sens, mais tout Balzac y
sera en un seul bloc et à la virgule près !
5. Topologie de l'espace des homéomorphismes de Brouwer
Nous pouvons maintenant essayer de donner une (petite) idée de ce qui se passe dans cette thèse. Un « homéomorphisme de Brouwer » est un certain type de système dynamique, dont l'ensemble d'états X est le plan. Une des hypothèses essentielles est qu'il ne doit pas posséder de point fixe : si h est un homéomorphisme de Brouwer, aucun point du plan x ne peut être égal à son premier itéré h(x).
5.1 Des exemples
Les Figures 5, 6 et 7 ci-dessous représentent une courbe comme celles qui sont dessinées (et une seule), et que la transformation consiste à « se déplacer le long de la courbe, dans le sens des flèches, sur une distance de 1 centimètre ».
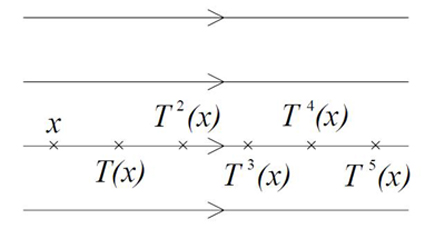 Figure 5
: Une translation
|
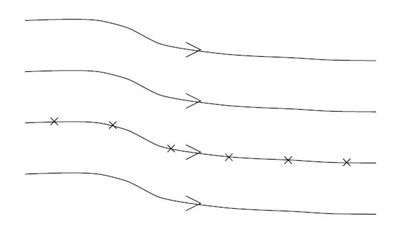 Figure 6
: Une translation un peu
déformée
|
Le premier est une simple translation vers la droite. Le deuxième ressemble beaucoup à la translation, puisqu'on peut l'obtenir à partir du premier dessin en déformant un peu la feuille (on peut imaginer que celle-ci est en caoutchouc et qu'on tire la partie droite vers le bas sans bouger la partie gauche) ; on dit qu'il est « conjugué » à la translation. Le troisième, par contre, est différent ; on l'appelle « l'homéomorphisme de Reeb ».
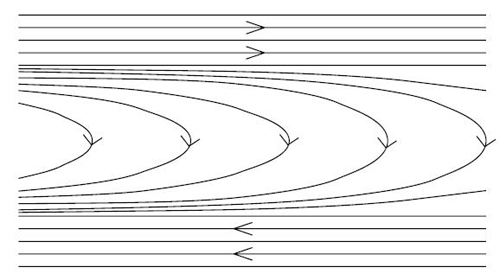 Figure 7
: L'homéomorphisme de Reeb
|
Voici un comportement dynamique qui permet de distinguer la translation de l'homéomorphisme de Reeb : prenons n'importe quel disque du plan, et observons d'abord ce qui se passe lorsqu'on itère la translation (voir Figure 8 ci-dessous).
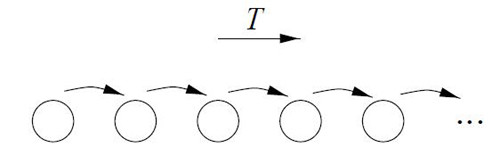 Figure 8
: Itérés d'un disque par translation
|
Au bout de quelques itérations, le disque disparaît entièrement du dessin ; on dit que ses itérés « tendent vers de l'infni ». Ceci est aussi vrai pour la translation déformée du second dessin. Par contre, si D est un disque qui rencontre la droite Δ1 (voir Figure 9 ci-dessous), ses itérés sous l'action de l'homéomorphisme de Reeb « s'accumulent » sur la droite Δ2.
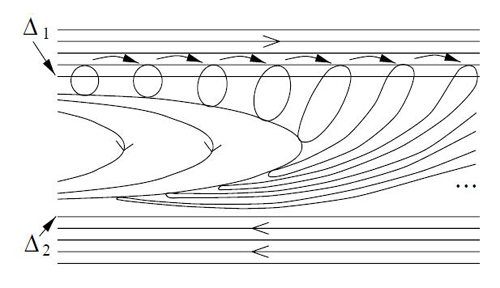 Figure 9
: Itérés d'un disque par
l'homéomorphisme de Reeb
|
5.2 Des propriétés remarquables
C'est Brouwer, au début du siècle, qui a étudie le premier ce type de système dynamique [7]. Son résultat principal dit qu'un homéomorphisme de Brouwer h quelconque, même s'il peut être globalement très différent de la translation, lui « ressemble » sur des grands domaines du plan. On peut expliquer facilement un des résultats intermédiaires : sous l'action de h, les itérés de n'importe quel point x du plan « tendent vers l'infini » [8] ; notamment, alors qu'on a supposé seulement l'absence de point fixe (chaque point est différent de son premier itéré), Brouwer démontre qu'il ne peut pas non plus y avoir de point périodique : chaque point est aussi différent de tous ses itérés ultérieurs.
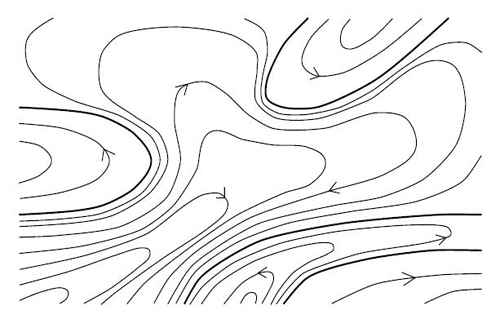 Figure 10
: Encore un homéomorphisme de Brouwer
|
5.3 Différents sens du mot "forme" : homotopie et topologie [9]
En épaississant un point, on peut obtenir un
segment,
un carré ou un disque, ou encore un cube (selon
le nombre de directions dans lesquelles on étire le
point). De même, un anneau ou un tore plein peuvent
être obtenus à partir d'un cercle. La
théorie
de l'homotopie ne considère que les
propriétés qui ne
changent pas lorsqu'on épaissit un objet : on dira
qu'un cube « a le type d'homotopie du point », ou
qu'un anneau « a le type d'homotopie du cercle ».
Par
contre, elle distingue un segment d'un cercle, parce
qu'on ne peut passer du premier au deuxième sans
effectuer un « recollement », ce qui est interdit.
La topologie, elle, n'autorise pas les épaississements
mais seulement les déformations : une étude
topologique est plus fine qu'une étude homotopique.
Par exemple, un segment a la même topologie qu'un
demi-cercle, et un carré (plein) a la même
topologie
qu'un disque, mais le topologue distingue les segments
des carrés.
5.4 Dans la thèse
Les translations (ou les conjugués
à la translation) ont un comportement dynamique
très simple ; certains articles décrivent par
contre des
homéomorphismes de Brouwer avec des
propriétés dynamiques
compliquées. Cette remarque conduit µa
se demander s'il est possible de passer progressivement,
« continûment », de la translation
à n'importe
quel autre homéomorphisme de Brouwer. On
considère alors l'ensemble de tous les
homéomorphismes
de Brouwer comme un espace abstrait B dans lequel
on cherche les différentes manières de se
déplacer ; on
aimerait notamment connaître la « forme »
de cet espace.
Le principal résultat dit que B a le
type d'homotopie
du cercle. Cependant, nous n'avons pas réussi à
déterminer sa topologie : on peut imaginer B
comme
un cercle épaissi selon une infinité de
directions
indépendantes, ce processus d'épaississement
n'étant
pas encore parfaitement clair.
6. En forme de conclusion
J'ai soigneusement évité, jusqu'ici,
d'aborder une
question récurrente, LA question posée par tous
les
non-mathématiciens :
« MAIS A QUOI ÇA SERT ? Autrement dit, comment
les mathématiques peuvent-elles nous aider à
comprendre le monde dans lequel on vit, à agir sur
lui ?
- Voici une réponse possible : les mathématiques
sont
un langage pertinent pour décrire la
réalité. Depuis
Galilée, une grande partie des sciences physiques
utilise ce langage. Et les physiciens ne se servent
pas uniquement des notions mathématiques de base ;
la physique théorique nécessite des concepts
très abstraits
qui posent aux mathématiciens des problèmes
complexes.
- Donc, les homéomorphismes de Brouwer servent à
résoudre des problèmes physiques...
- A vrai dire, non, pas vraiment. L'utilité des
mathématiques
est une utilité globale, mais il faut se garder
de penser que chacune des questions étudiées est
liée
à un problème physique. Comme un grand nombre
de concepts, les homéomorphismes de Brouwer ont
été introduits lors de l'étude d'un
problème interne
aux mathématiques, et leur étude devient
elle-même
un nouveau problème qui pourrait faire apparaître
de
nouveaux concepts qui eux-mêmes...
- Enfin de compte, tu avoues que les homéomorphismes
de Brouwer ne serviront jamais à rien, et pourtant
tu étudies la topologie de leur espace !
- On ne peut pas dire ça non plus... Les
mathématiques sont une science trµes
particulière,
où chaque problème est relié
à beaucoup
d'autres, où les
passerelles entres les différents domaines sont nombreuses
et souvent inattendues. Ainsi, chaque étude
peut faire avancer d'autres problèmes et « servir
»
de
manière indirecte. D'autre part, les concepts
inventés
par les mathématiciens sont souvent très
généraux, et
ils ont la mauvaise habitude de ressurgir de manière
centrale pile à l'endroit où on ne les attendait
pas !
En cherchant à obtenir une formule donnant les
zéros
d'un polynôme de degré 5, on est conduit
à
étudier
l'ensemble des permutations de ces zéros, puis (par
généralisation) on invente le concept de
« groupe
» ;
ce même concept s'avère ensuite d'un
intérêt
primordial
dans la mécanique quantique, dans la théorie de
la relativité générale ou dans
l'étude des
symétries
des cristaux... Autre exemple, dont nous avons
déjà
parlé : le théorème ergodique de
Birkhoff.
L'énoncé
est motivé par un problème physique, mais la
preuve
passe par des concepts mathématiques
développés
indépendamment ; après quoi le
théorème
s'applique à
des situations physiques aussi différentes que
l'étude
des gaz, du système solaire ou des billards, et à
la
statistique sur les décimales des nombres !
- Mais comment on peut être motivé par une
utilité
aussi lointaine et hypothétique ? !
- On touche là au fond du problème. En fait, le
plaisir
qu'on ressent à faire des mathématiques n'est pas
du
tout lié à leur «
applicabilité ». Il y a un plaisir
purement intellectuel, qui tient à la fois de
l'émotion
esthétique du créateur et de la soif de
découvertes
de l'explorateur. Prenons le « paradoxe de Banach-
Tarski » : c'est un théorème qui
affirme qu'il existe
une manière de découper une boule en quatre
morceaux, puis de déplacer ces morceaux pour reconstituer
deux boules qui ont chacune la même taille
que la boule de départ ! ! C'est un résultat qui
semble
contredire la réalité physique, puisque personne
n'a
jamais réussi à fabriquer de cette
manière deux oranges
à partir d'une seule ; pour les mathématiciens [10],
ce paradoxe apparent rend le théorème d'autant
plus
fascinant... Il y a aussi, à un autre niveau, un plaisir
ludique dans la manipulation des symboles comme
pour les pièces d'un puzzle.
- Alors, en ce sens, c'est une activité artistique
particulièrement
inaccessible, un peu comme si seuls les
musiciens pouvaient ressentir une émotion musicale !
- C'est vrai ; mais peut-être avez-vous malgré
tout
pris quelque plaisir à l'écoute de cette
partition simplifiée ?… »
Bibliographie
George David Birkhoff, What is the ergodic theorem, American mathematical monthly, april 1942, vol 49 p. 222-226.Jean-Paul Delahaye, Le fascinant nombre π, Bibliothèque « Pour La Science ».
Ivor Grattan-Guinness, The Fontana history of mathematical sciences, Fontana Press, London 1997.
Anatole Katok et Boris Hasselblatt, Introduction to the modern theory of dynamical systems, Encyclopedia of Mathematics and its Applications (vol 54), Cambridge University Press, 1995.
OULIPO, Atlas de littérature potentielle, Folio Essais (poche).
Notes
[1] En fait, la définition correspond aux systèmes dynamiques dits discrets, par opposition aux systèmes dynamiques continus.
[2] Le procédé s'inspire des travaux de l'OuLiPo, groupe de littérature expérimentale fondé par l'écrivain Raymond Queneau et le mathématicien François Le Lionnais.
[3] En l'honneur de Maxwell, elle est aussi appelée « hypothèse de Boltzmann ».
[4] L'énergie cinétique d'un corps est l'énergie qu'il possède du fait de sa vitesse ; c'est aussi l'énergie qu'on peut récupérer en amenant ce corps à l'arrêt : pour stopper sa voiture, un conducteur peut freiner, c'est-à-dire transformer son énergie cinétique en chaleur dégagée lors du frottement des plaquettes de freins sur le tambour, ou bien rentrer dans un mur, auquel cas l'énergie cinétique sert à déformer le mur et la voiture (et éventuellement le conducteur). Cette énergie est égale à la moitié du produit de la masse par le carré de la vitesse.
[5] Le théorème annonce que « presque tous » les nombres possèdent ces propriétés statistiques ; mais pouvez-vous trouver un nombre qui les verité ? Les nombres les plus simples à décrire sont les nombres rationnels, dont la suite des décimales est périodique (voir plus haut). Cependant, ces nombres ne se comportent pas de la manière voulue : considérons en effet un tel nombre z et appelons n la longueur de la séquence de décimales qui se reproduit périodiquement ; alors, par exemple, la séquence composée de n fois le chiffre 1 et d'un 2 n'apparaît pas dans les décimales de z. Au passage, ceci entraîne donc que presque aucun nombre n'est rationnel ! Quant aux décimales du nombre π, bien qu'on en ait calculé 51 milliards, on ne sait pas répondre aux questions statistiques les concernant ; personne ne sait s'il y a une infinité de 7 dans l'écriture décimale du quotient entre le périmètre et le diamètre des cercles...
[6] On peut voir le rapport avec la formulation de l'hypothèse ergodique par Maxwell : en particulier, partant d'un nombre pris au hasard, la valeur entière des itérés sous l'action du SHIFT prend toutes les valeurs possibles, de 0 à 9.
[7] Brouwer espérait que son étude aiderait à résoudre un « problème de Hilbert » concernant les « actions de groupes topologiques » ; en fait, ce problème a par la suite été abordé avec des techniques différentes, et l'étude des homéomorphismes de Brouwer a été poursuivie pour son intérêt propre.
[8] Voici le sens précis de cette expression : si on considère n'importe quel disque D du plan, même très grand, il n'existe qu'un nombre fini d'itérés de x qui sont dans D : au bout d'un certain nombre d'itérations, on n'obtiendra plus que des points à l'extérieur du disque.
[9] Les définitions formelles de ces notions étant assez compliquées, les explications qui suivent sont nécessairement très schématiques.
[10] Ce résultat est « non constructif », parce qu'il annonce l'existence d'un objet qu'il n'est pas possible d'expliciter ; certains mathématiciens (comme Brouwer à certaines périodes de sa vie) refusent de considérer les énoncés de ce type.